

Animation Research



Fluid Collision in Maya
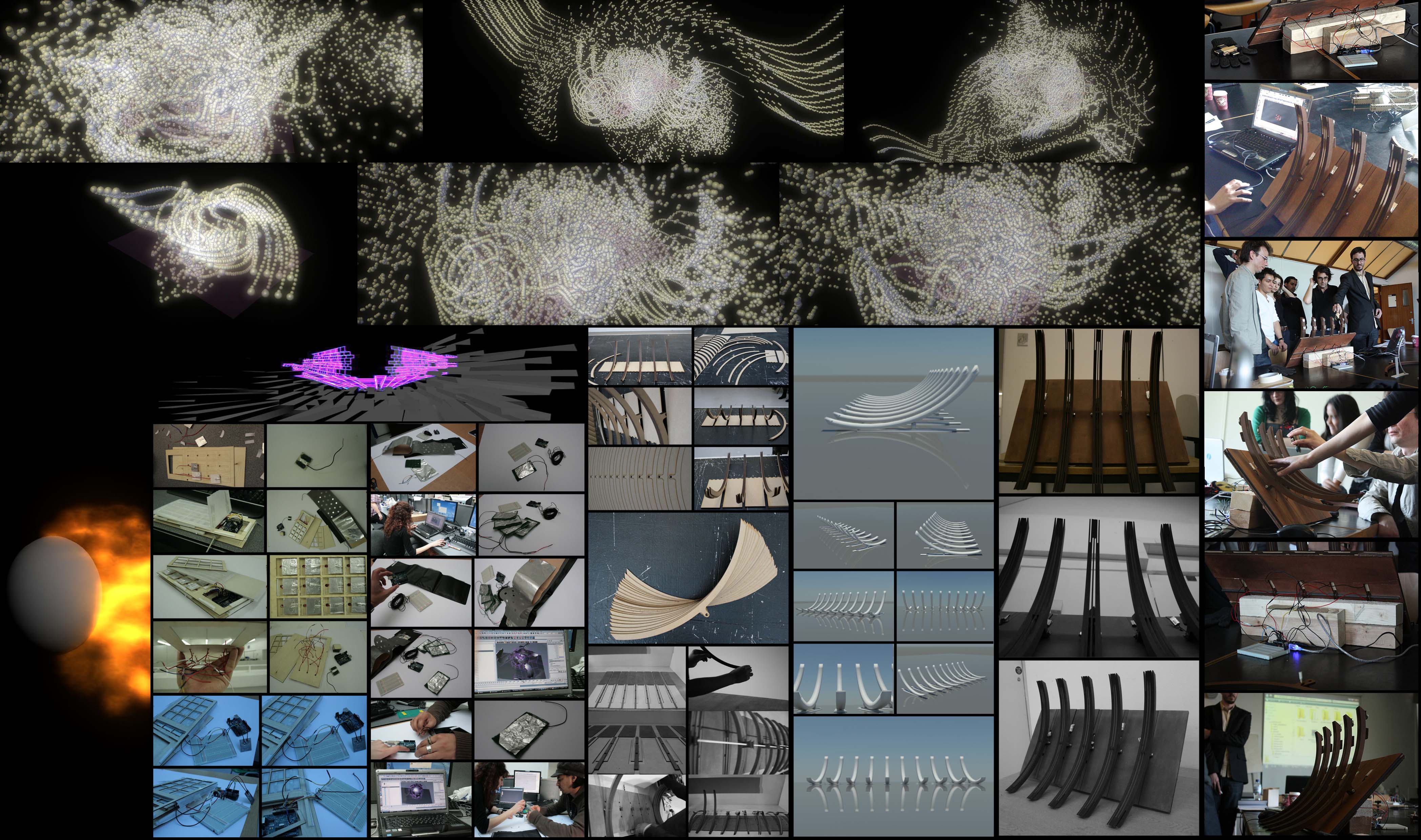
Maya Applied Animation ~ Particle Motion Animation Final_Rendered_Stills
Rendered Stills from the Final Animation in Maya in the Applied Animation module at the University of Westminster
The animation consists of 4 sets of particle groups and each group has a set of 4 particles.
On each particle within the group there is a linear emitter. The particles have a timeline of 1000 frames applied for the movement. Also for the movement each group of 4 particles has a Newton Field applied to them with a radial field for the emmited particles.
There for the animation starts with 16 particles and ends with the 16 particles having emmited thousands of other smaller particles.
Further set Attributes responsible for the movement and multiplying of the particles are rotations and moved positions on the X-Y-Z Axis of the plane.
Important part in this animation is the Magnitude ( set at 10) and the Attenuation (set at 1.63) attributes throughout the animation.
Starting point position for the particle groups is (0.4, 0.-4, 4,0, -4,0) at the plane.
There is also an extra plane in transparent shade which has 2 turbulence fields attached. The turbulence fileds have minimal magnitude and attenuation factor for it’s slow deformation within the timeline of 1000 frames.
Rendered stills within the 1000 frames










Table
The table below shows the animation objects (particles, newton field etc) at the start of the animation [timeline at 0 frames] their initial position and their final position at the end of the animation [timeline at 1000 frames].

Maya Applied Animation ~ Evolving Ideas
Familiarizing with Maya dynamics effects. Based on the carried research, the following rendered stills show experimental effects applying dynamic fields and attributes which had potential to be controlled by sensors. Either by recording the sensor values and attributes or physically connecting sensors to Maya
Factors:
Gravity, Forces, Magnitude, Attenuation, Geo-Connector, Turbulence, Radials, Newton
Effects:
Fire









Shatter Effecton a NurbsSphere
Expressions tested for Sensor use
float $sensor1 = sensorInput.sensor1;
float $upper = 0.5; / float $lower = 0.2;
if (($sensor1<=$upper)&&($sensor1>=$lower)){nurbsSphere1.rotateZ = $sensor1*10;}
Expression to drive goal weight of shatter1LatticeParticle from the goal weight attribute of nurbsSphere1.
for shatters 1-45:
if ( nurbsSphere1.shatter == 1)
{shatter1LatticeParticleShape.goalWeight[0] = nurbsSphere1.goalWeight;}
else
{shatter1LatticeParticleShape.goalWeight[0] = 1;}
test:nurbsSphere1.shatter= sensorInput.sensor2*10;
NurbsCone – Radial Force

if ( nurbsCone1.shatter == 1 ){ shatter27LatticeParticle }else {shatter27LatticeParticle{
Shape.goalWeight[0] = nurbsCone1.goalWeight;Shape.goalWeight[0] = 1;}
// Expression to force an update of the soft body shatter27LatticeParticle // while it is not visible.//
int $minX = shatter27LatticeParticle.boundingBoxMinX;
Other Animations tested with Sensor Inputs

Maya Applied Animation ~ Device Emerging Principle~ Development
Principle:
- From previous sensor inputs tests ——->shatter——>particles.
- Particles as the basis of the animation where more emphasis is spent on their movement entering the realms of cosmology. Particles are the most basic form of matter. They are attracted together by gravitational or electromagnetic forces.
- Buttons to trigger animations on screen
Physical Model
- Model to incorporate pivotal mechanism to allow for an obvious movement governed by a magnet.
- When propping the device horizontally, a contact happens using a pivotal connection.
- Problem encountered in trying to break the circuit.
- Difficulty in keeping the weight distribution even after a connection has been made.
- Rotating the device 90 degrees and only keep the touch sensors at the top.
- A curved shape based around a pivot allows for the connection to be broken due to its self weight once the magnetic force is removed.
- The aerodynamic shape also allows for a more efficient user navigation and can be utilized for a stronger interaction.
- Force to be exerted as the surface area of the mechanism increases, given the assumption that the force is proportional.
A repelling force is exerted by reversed polarisation achieved with a magnet attached to the surface of the device and a mirroring orientation of another magnet in the hands of the user. In addition the curved shape correlates with the curved motion path of the particle display adopted in the animation.
Arduino Board

Development ~ Process

Device ~ “MAKE”

Device ~ RENDERED STILLS

Device ~ “MADE”

+PR353NT@510N+
Vodpod videos no longer available.
